文章:如何进行运动控制器ZCAN总线扩展模块的使用?
所有者:TerryWang(呢称); 发布时间:2020-09-25 00:21:10; 更新时间:2020-09-29 00:29:21
阅读所需积分:0;
简介:点击蓝字 关注伺服与运动控制之前正运动技术与大家分享了,运动控制器的固件升级、ZBasic程序开发、ZPLC程序开发、与触摸屏通讯和输入/输出IO的应用以及运动控制器数据与存储的应用等。今天,我们来讲解一下正运动技术运动控制器ZCAN总线扩展模块的使用。教学视频1、材料准备与控制器接线参考材料准备:1)电脑1台,安装ZDevelop3.01以上版本软件。2
之前正运动技术与大家分享了,运动控制器的固件升级、ZBasic程序开发、ZPLC程序开发、与触摸屏通讯和输入/输出IO的应用以及运动控制器数据与存储的应用等。
今天,我们来讲解一下正运动技术运动控制器ZCAN总线扩展模块的使用。
1、材料准备与控制器接线参考


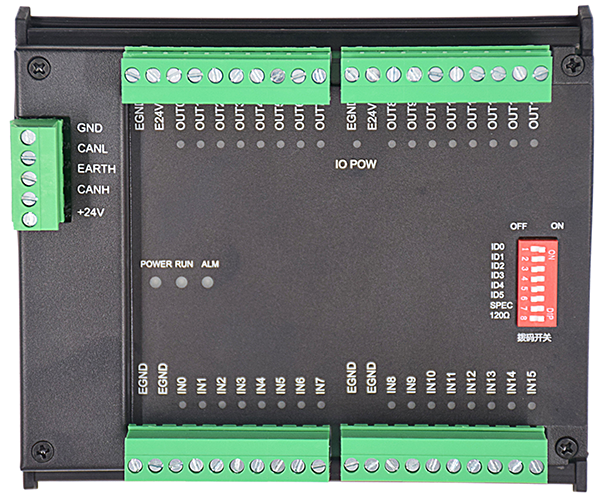


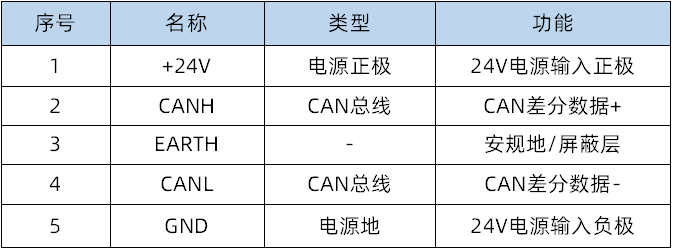

ZMIO300-CAN扩展模块使用接线:




ZCAN通讯速度设置
拨码5-6选择CAN通讯速度,组合值范围0-3,对应是速度如下表:


IO映射和拨码开关设置注意事项:
配置一:ZIO系列
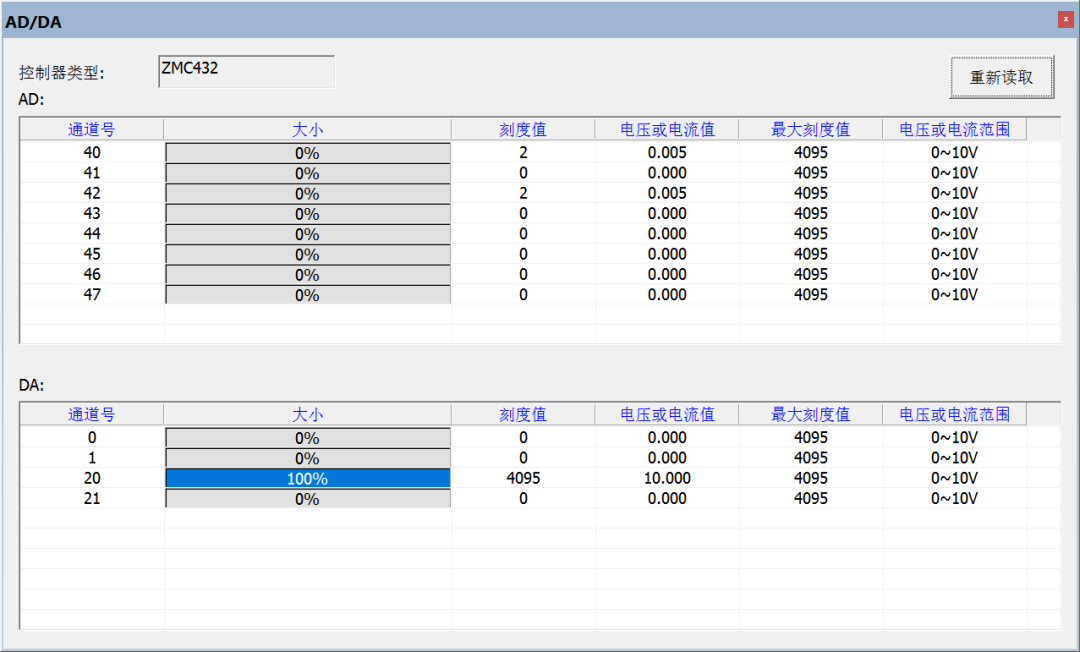
ZAIO0802的CAN ID设置为4,扩展的模拟量输入AD编号为40-47共8个,扩展的模拟量输出DA编号为20-21共2个。
配置二:ZMIO300系列


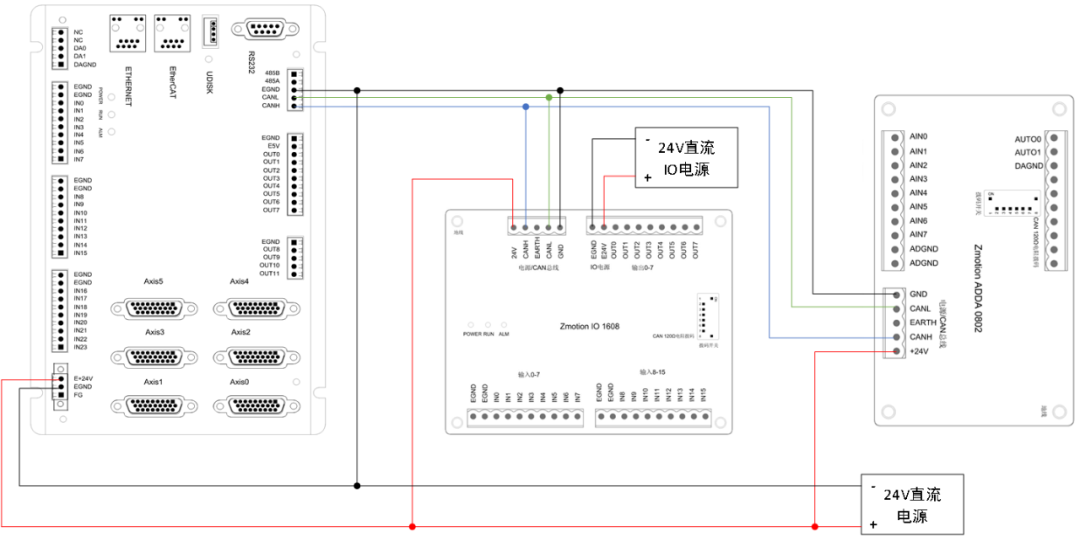
例程控制模块配置:1个ZMC432+1个ZIO1632+1个ZIO16082+1个ZAIO0802,接线参考图:
RAPIDSTOP(2)WAIT IDLECANIO_ENABLE = ON '打开CAN主端功能,缺省为ONCANIO_ADDRESS = 32 '设置主端,缺省为主端,CAN波特率500KBPS,对应速度拨码组合值0'CANIO_ADDRESS = 32+ 256 '设置主端,CAN波特率为250KBPS,对应速度拨码组合值1'CANIO_ADDRESS = 32+ 512 '设置主端,CAN波特率为125KBPS,对应速度拨码组合值2'CANIO_ADDRESS = 32+ 768 '设置主端,CAN波特率为1MBPS,对应速度拨码组合值3delay(300) '延时300ms '判断扩展板的连接状态'CanID 1 ZIO1632 in(32)~in(47),op(32)~op(63)'CanID 3 ZIO16082 in(64)~in(79),op(64)~op(71),axis*2'CanID 4 ZAIO0802 ain(40)~ain(47),aout(20)~aout(21) IF CANIO_STATUS(1)=1 AND CANIO_STATUS(3)=1 AND CANIO_STATUS(4)=1 THEN '判断IO板的连接状态 PRINT "扩展模块连接成功"ELSE while 1 PRINT "扩展模块连接失败" delay(1000) wend ENDIF'扩展板 ZIO16082 轴号映射atype(6)=0 '设为虚拟轴atype(7)=0AXIS_ADDRESS(6)=(32*0)+3 'CANID为3,ZIO16082扩展板的本地轴接口0映射到轴6AXIS_ADDRESS(7)=(32*1)+3 'CANID为3,ZIO16082扩展板的本地轴接1映射到轴7'控制ZIO16082的2个轴BASE(6,7) '选择扩展轴轴号ATYPE=8,8UNITS=100,100 '脉冲当量设置SPEED=100,100 ACCEL=1000,1000 DECEL=1000,1000 DPOS=0,0MPOS=0,0TRIGGER '自动触发示波器MOVE(100,100) '两轴直线插补MOVE_OP(40,ON) '控制ZIO1632的输出MOVE_OP(64,ON) '控制ZIO16082的输出AOUT(20) = 4095 '控制ZAIO0802的AOUT0输出10V电压

本文由正运动小助手原创,欢迎大家转载,共同学习,一起提高中国智能制造水平。文章版权归正运动技术所有,如有转载请注明文章来源。
伺服与运动控制
https://mp.weixin.qq.com/s/5tPJo-JL7gq_j1D5p4cf9Q